本研究室では,
柔軟性の高いアクチュエータ
を開発,制御することで周囲の人間に優しいロボットの開発を目指しています.
そこで,空気圧を制御することで駆動させる
空気圧ゴム人工筋肉
に着目しました.
空気圧ゴム人工筋肉は,ゴムと炭素繊維でできたチューブに空気を入れることで,生物の筋肉のように収縮します.
ゴムの厚みやチューブの太さを変えることで特性を調整でき,繊維の方向によっても動きが変わります.
また,この空気圧ゴム人工筋肉はただ柔らかいだけでなく,大きな出力特性を持っていることも特徴です.
軸方向繊維強化型人工筋肉
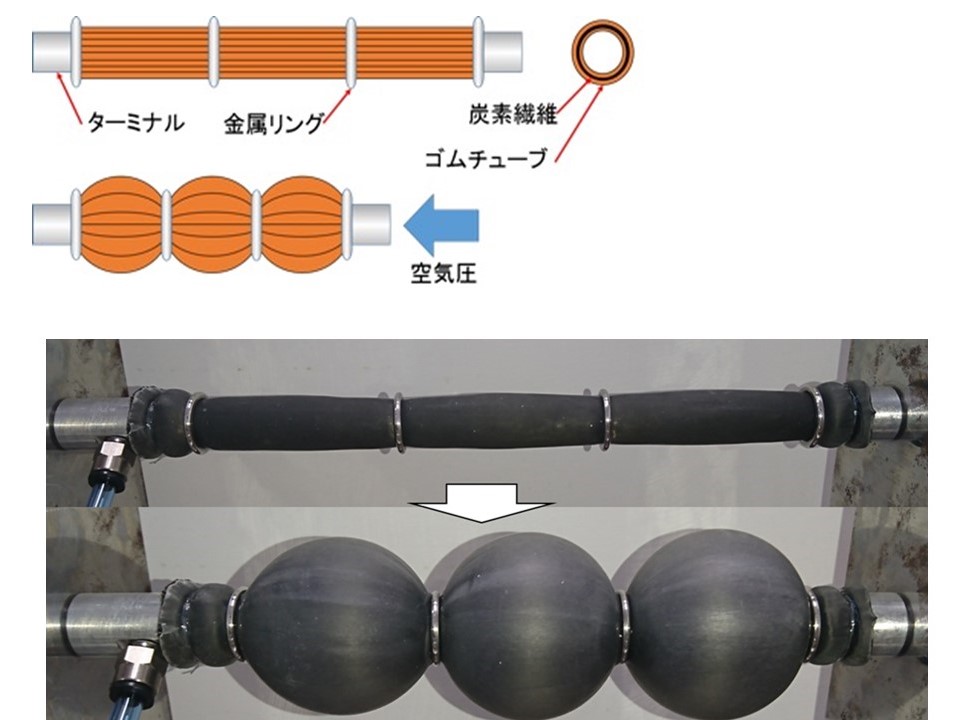
空気圧ゴム人工筋肉の研究の多くはMcKibben型人工筋肉と呼ばれる網状のスリーブ内にゴムチューブを入れたものが使われています.
しかし,チューブとスリーブ間の摩擦による耐久性の低下や,他のアクチュエータに比べ,収縮量が少ないという問題点があります.
そこで,私たちはこれらの問題を改善した
軸方向繊維強化型人工筋肉
を用いた研究をおこなっています.
軸方向繊維強化型人工筋肉はゴムチューブと炭素繊維を使って作ることができます.ゴムチューブに対して,軸方向に炭素繊維を貼り付けることで空気圧を印加した際,拘束していない径方向に膨張します.
これにより,アクチュエータはゴムチューブの軸方向に収縮することができます.
人工筋肉における繰り返し耐久性向上
本研究では空気圧ゴム人工筋肉の繰り返し耐久性向上に関する研究をしています.
人工筋肉は医療現場やパワードスーツとして利用されています.
しかし,広い普及には至っていません.それは繰り返し耐久性が解明されていないからです.
本研究では,人工筋肉の繰り返し耐久性について調査,実験を行い,
長寿命な人工筋肉
の作製を目指します.
修復可能な人工筋肉

熱可塑性エラストマ
を用いた人工筋肉を作製・研究しています.
熱可塑性エラストマとは熱を加えると加工でき,冷却時に弾性を示す材料です.
これを人工筋肉に用いることにより,破損時に人工筋肉に熱を加えて修理できると考えています.
人工筋肉を用いた超冗長マニピュレータ
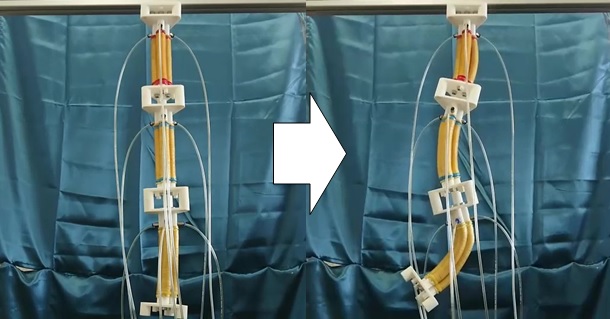
人の腕のように手でつかんだモノを動かしたり,姿勢を変えたりするロボットをマニピュレータといいます.
本研究室では,人と協調作業を行う環境や,複雑な環境において安全性が確保できる
軽量かつ柔軟なマニピュレータ
の開発を行っています.
空気圧を印加すると湾曲するゴム製の人工筋肉
(湾曲型空気圧ゴム人工筋肉)
をアクチュエータとして使用し、これを3本束ねた構造を1つのユニットとしています.
2自由度での駆動が可能なユニットを複数連結することによって,象の鼻のように複雑な動作が可能です.
このマニピュレータのメイン構造は人工筋肉で構成されているため非常に柔軟な構造を持っています.
プーリやリンク機構など硬い機構を用いていないため,障害物と衝突した場合でも十分な安全性を確保することができます.
人工筋肉を用いたロボットハンド
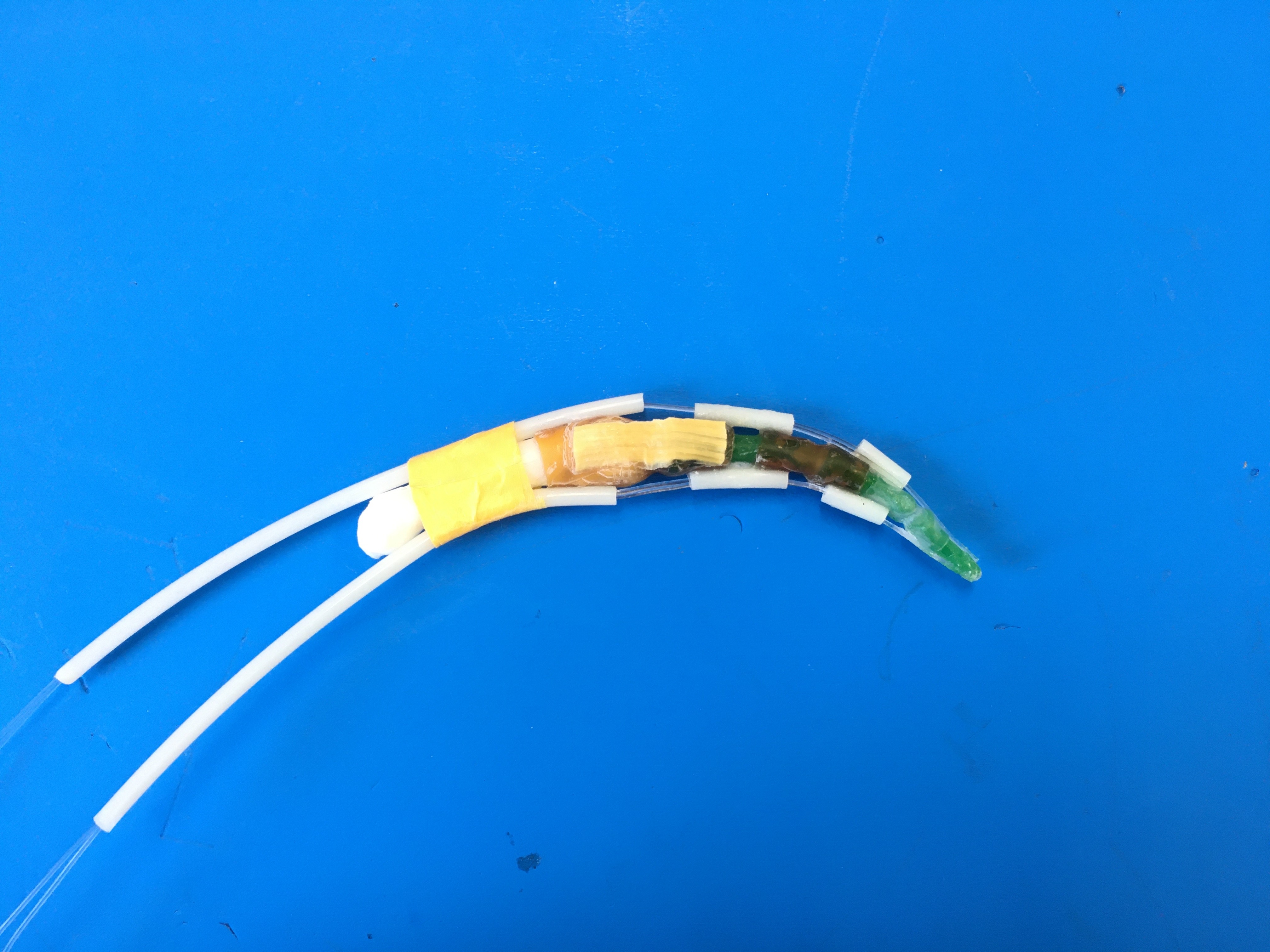
本研究では,
人間の前腕の構造
を再現したロボットハンドの開発を行っています.
人間の手は非常に優れており,柔軟性を持ちながら非常に巧みな動きが可能になっています.
そこで本研究では骨格,腱,靭帯,筋肉など人間の手の要素をロボットで再現し,人間の手の持つ優れた能力がどこから来るのか調査することを目指しています.
さらに,本物の筋肉に近い出力特性を有する
空気圧ゴム人工筋肉
をアクチュエータとして取り入れることで,ロボットハンドの特性を本物の手に近づける事を目指します.
構造や出力特性が本物に近いロボットハンドを開発することで,義手や人間と接するパーソナルロボットの分野で役に立つと考えています.
自歪走行ロボット

本研究では,湾曲型人工筋肉を用いた移動ロボットの開発を行っています.
本ロボットはフレーム部を人工筋肉で構成しているため
構造的に柔軟な機構
となっており,人や物との衝突時にも高い安全性が期待できます.
フレーム部を人工筋肉で構成しているため,人工筋肉の駆動時に
ロボット自身
が変形し,ロボットの重心が傾くことで転がることができます.
このロボットにカメラや触覚センサを搭載することで、高齢者や子どもを見守るロボット・探査ロボットへの応用を考えています.
人工筋肉を用いた4足歩行ロボット
空気圧ゴム人工筋肉はアクチュエータとして利用する際,非線形性や遅れが大きく,制御が難しいとされています.
そこで,本研究では空気圧ゴム人工筋肉を用いた歩行ロボットを作製し,非線形性や遅れによる影響を受けない
環境適応性の高い制御法
の適用を目指しています.
現在はロボットの脚に対して新たな制御法を組み込み,実験を行っています.
人工筋肉を用いた膝関節補助装具

本研究では,
McKibben型人工筋肉を使った膝を補助する装具を研究しています.McKibben型人工筋肉は,
空気圧を加えることで収縮する,やわらかいアクチュエータです.特性が人間の筋肉と近いため,装具の様に人間の体に取り付ける機器と
相性がいいと言えます.私たちの装具では,
全長960mmの人工筋肉を腰からつま先にかけて,脚の前面を通るように配置しています.
これにより,人工筋肉の収縮する力が身体を支える力に変換でき,膝への負担を和らげると考えています.私たちはこの装具を発展させ,
ゆくゆくは農作業に利用したいと考えています.
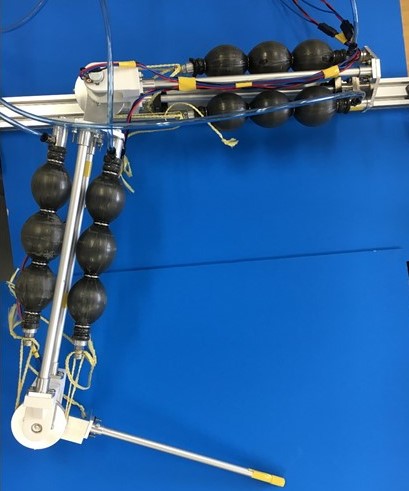
人工筋肉と非円形プーリを組み合わせた関節構造の制御
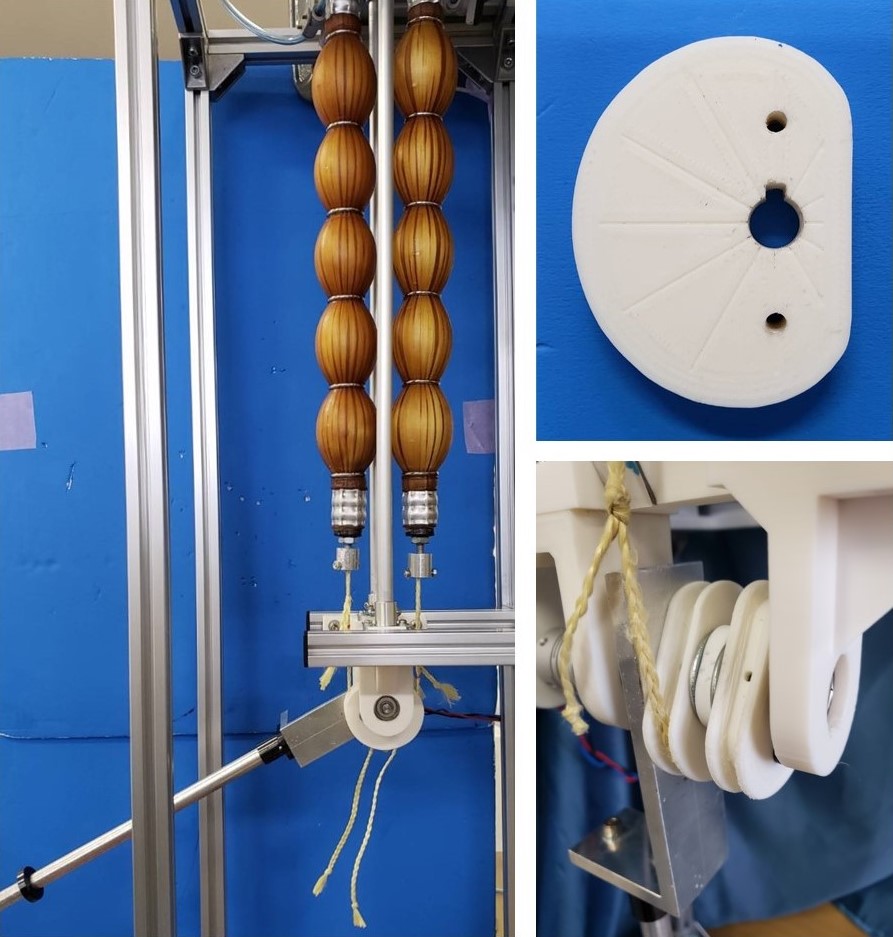
空気圧ゴム人工筋肉を用いたソフトロボットアームは、高いバックドライバビリティーを実現できるため、
人や物、周辺環境との安全な接触を簡単な制御で実現できることから、人間共存型ロボットとしての利用が見込まれています。
しかしながら、人工筋肉は
収縮に伴い収縮力が低下する出力特性を持つため、
ワイヤ・プーリ機構を用いたマニピュレータでは出力トルクと関節可動範囲のトレードオフの関係から抜け出せず、
マニピュレータの設計が制限されていました。
そこで本研究では、非円形プーリを設計しマニピュレータに搭載することにより、
この出力特性を改善しマニピュレータの性能を向上させました。今後は、マニピュレータの制御方法を模索していきます。
〒992-8510
山形県米沢市城南4-3-16
山形大学工学部機械システム工学科 戸森研究室
Email:tomori@yz.yamagata-u.ac.jp
TEL:0238-26-3217
